In anticipation of Archipelago, we spoke with Andrea Anner and Thibault Brevet of AATB (Practice for Non-Industrial Robotics), who with Gabrielle Laurin ran a workshop at HEAD in late February entitled ‘Artificial Nutrition’. Their practice experiments with industrial robotic systems and uses tools such as robotic arms to explore Human-Machine interactions through kinetic and interactive situations. Andrea and Thibault’s collaboration began during their diploma studies, as they graduated in 2012 with graphic design degrees, and the duo is currently based in Marseille. Gabrielle is the most recent addition to the team and is a set designer from Paris.
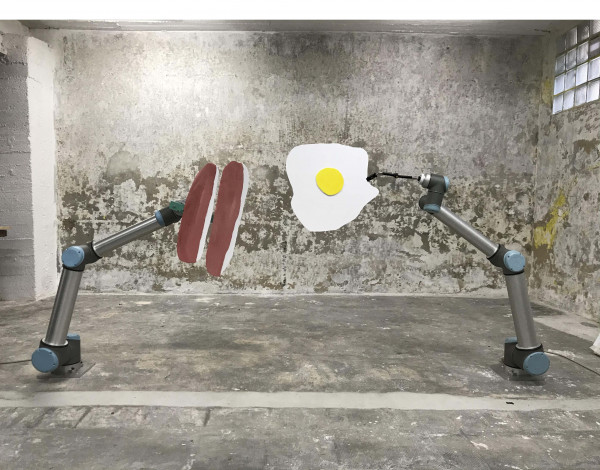
AATB’s interest in robots began after a visit to an exhibition that examined the use of robotics in architecture. Excited by the possibilities for other design fields, Andrea and Thibault began experimenting with work that now spans across installation, graphic design, type design, motion capture among other interests. Their practice imagines a more relatable and fragile form for the robot. While robots are usually depicted by popular culture as precise and efficient tools of production or as the harbingers of techno-apocalypse, within AATB’s work the robot is exposed and susceptible to all the impotences that fleshy-bodied beings experience, things like laziness, and clumsiness. These tensions in AATB’s robots make them and their performances poetically strange and almost absurd—a robotic arm that blows soap bubbles or two giant soft hands attempting a handshake, for instance.
At HEAD, the workshop they developed for the multidisciplinary week “La semaine de tous les possibles”—prompted by Archipelago—sought to continue this line of exploration by placing robots within the distinctly organic rituals that surround food and its preparation and presentation. Why food? In AATB’s characteristic fashion of unpretentious and hungry inquiry, why not? They admit the impetus for the workshop was a burger robot in San Francisco that served them lunch, both terrifying and funny. Beyond that anecdote, they explain that food, being an everyday essential, exists within a social melting pot of audiences, choreographies, and performances and therefore is well-aligned with AATB’s other work. This inquiry becomes especially relevant within the context of the pandemic lockdown, where these social rituals are deeply complicated. Robots do not need food, but we do. What are the potentials of a nutrition presented through artificial means?
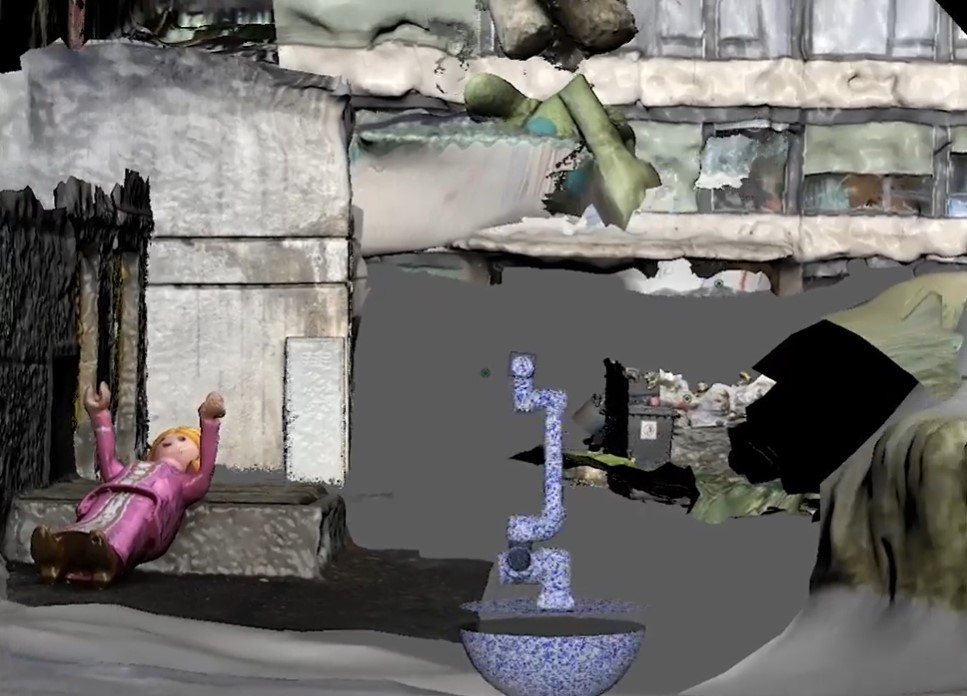
DUMPSTERDIVINGAPOTHEOSIS by Seongmin Kim
The workshop was held virtually using the 3D modeling and animation software, Maya, and a specialized plug-in, Mimic, to simulate robot arms. With these tools, students were able to explore the full range of robotic movement with precision in a virtual space. This is a kind of digital rehearsal that AATB often stages within their own work. Machine code developed in the virtual realm is exportable and can be used to script real robot movement. AATB can prototype and test ideas in the form of this kind of digital sketch, one that is hyper-precise in terms of dimensions and scale provided that it is based upon a model of high fidelity to real conditions. The question of whether or not a robot can reach the top shelf can be solved a priori and without the resource-intensive work of assembling on-site.
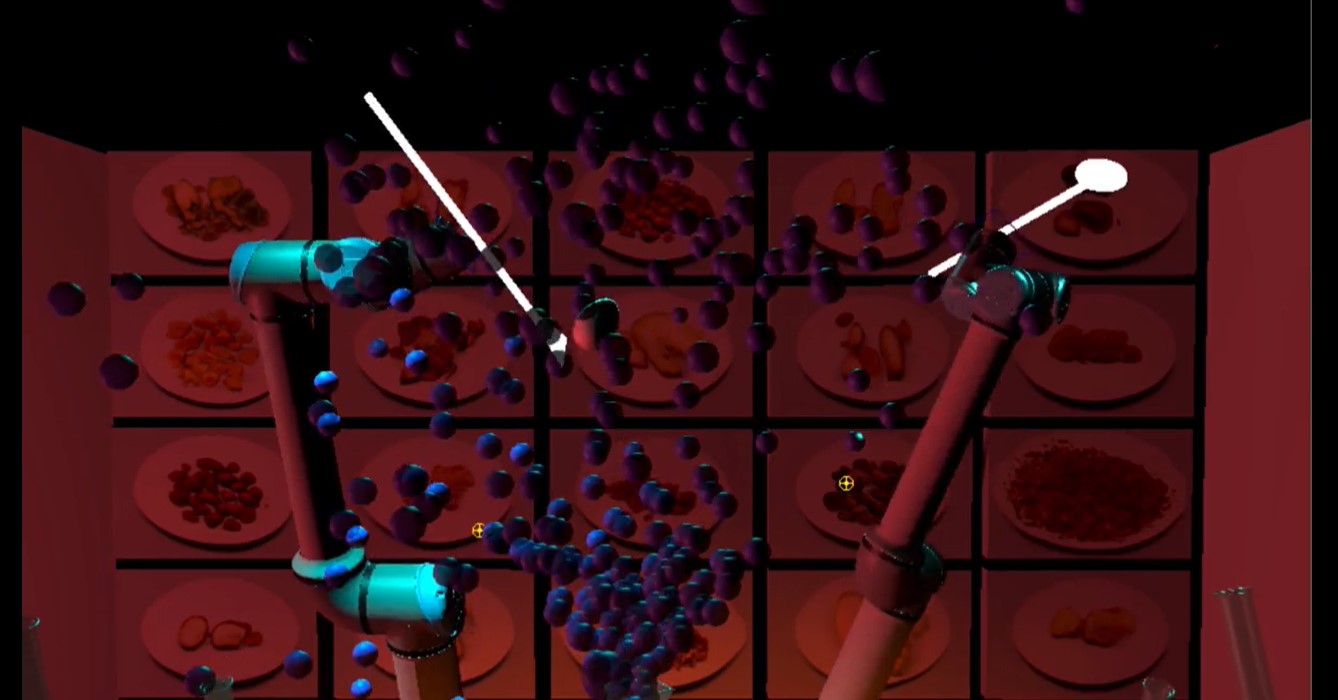
Sukiro by Alejandra Oros
Through this process, the boundary between digital and real worlds begins to dissolve, revealing the tolerances that exist between the two. If the on-site conditions are not perfectly reconciled with the Maya model, the whole thing begins to break down. When things do not match, absurdity results as the robot cannot recognize that something has gone awry, repeating or continuing with its script until it is stopped by a human agent. This is one example of the tension and possibilities within what AATB seeks to understand: the precision of robots emphasizes the imprecision of everything else; their world reflects back onto our own. As Thibault notes, the signal to noise ratio is amplified—when one complicating factor is removed, another is dialed up. AATB has discovered the hard way that the smallest deviations have serious effects within a robot-calibrated program. In one instance, elbows on a table can imperceptibly warp the wood surface, changing the level of a drawing machine. The drawing disappears and reappears. In another, a hotwire cutter sculpting a block of foam produces strange results because somebody shifted the orientation of an electric fan ventilating the room, changing the ambient air currents that bow the wire. Thus, the robot is not only a tool, but becomes a kind of sensor, revealing a dimension of our own physical realities to ourselves.
To be clear, AATB’s robots are not attempting to become human. Their robots do not look or behave as cyborgs. They are supporters and helpers—mirror-holders. The stereotype of robots being inaccessible, locked away and gate-kept by big industry, is challenged by AATB’s work. How do you make robots more understandable within the everyday? Imbue them with the capacity to fail, get them to blow bubbles. In this way, their robots offer a point of association; AATB’s robots are approachable because of their communicative capacity and ability to evoke character.
Our conversation concludes with a discussion of AATB’s forays into other fields. Their work is enriched by contact with professionals from a wide range of disciplines and in many cases, non-roboticists. Robots are transversal, meaning AATB is able to operate across many different fields. It is easy for them to jump, to land in a new space and begin questioning and building workflows and methodologies that do not yet exist using the tools they have carefully evolved through their experimentations. They describe robotics as a kind of Wild West, where almost anything is possible. So many big industry companies produce proof of concepts but have little idea of what to do with them. AATB works within this network to develop, with others, new and unexpected applications of robotic technology. One example is a subsidiary project, Superposition, that brings robotic motion capture within the sphere of film production. In a video posted on Superposition’s homepage, we see through the eyes of the robot arm, examining Roger Federer’s head, hands, and sneakered feet. The motion is disorienting and engrossing: too clear and too smooth to come from a human source. Again, we are left thinking about the gap between real and robotic worlds.
Aside from their work, what is most impressive about AATB is the fact that their knowledge is self-initiated. Neither Andrea nor Thibault have tech backgrounds and so the foundation of their expertise was built through a willingness to ask, to build their own tools and learning along the way. Interdisciplinarity becomes a necessary strategy for survival. Their approach is highly sympathetic to Archipelago’s, which argues for open and disaffiliated inquiry. Everything seems within arm’s reach. Please do not feed the robots because through AATB’s lens, there could be a robot that eats—probably not for sustenance, maybe to expose and amplify the sensations of flavor, texture, and smell. We leave the Zoom room with much to digest, just satisfied.
Workshop
AATB (Andrea Anner, Thibault Brevet with Gabrielle Laurin)
Students
Paul Bellon-Serre, Maylis D'Haultfoeuille, Marie Dupraz, Noam Ferrero, Seongmin Kim, Alexandre Moura Ferreira, Alejandra Oros Barriga, Vincent Paley, Eva Pracca, Patrizio Tannorella, Lauren Thiel, Saro Vallejo, Elsa Wagnières, Madeleine Wiedmer